ADAS/ADS ECU HIL System allows Automotive Tier1 suppliers and OEMs to Validate ADAS/ADS Sensor Fusion ECUs in a Closed-Loop Hardware-in-the-Loop environment.
The System provides connectivity to the ECU under test via all standard automotive communication buses/interfaces and allows to:
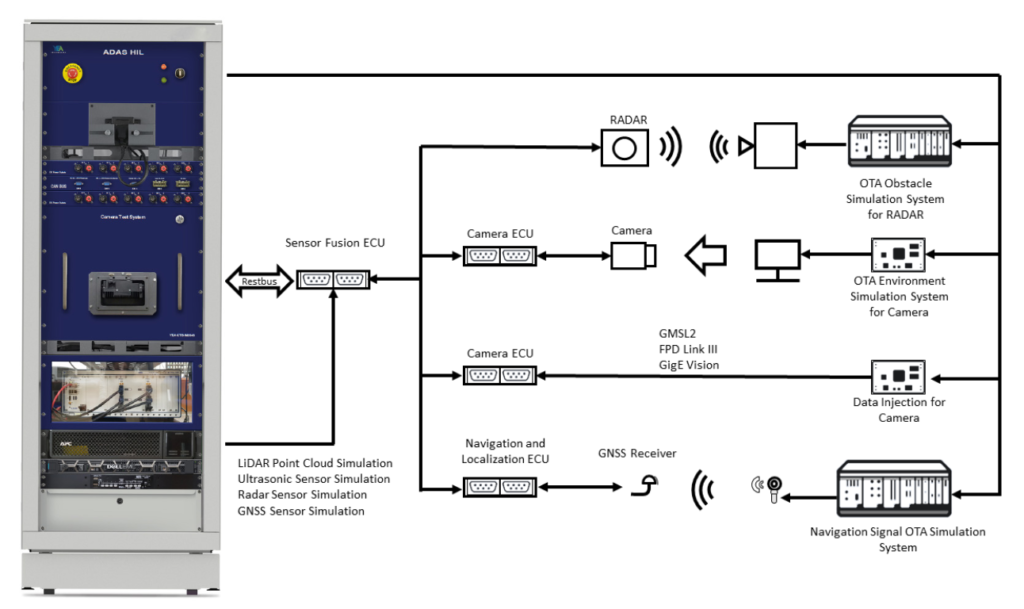
Simulate sensors (LiDARs, RADARs, Cameras, Ultrasonic Sensors, GNSS Receivers, IMUs)
Simulate vehicle Restbus
Simulate vehicle-dynamics
Simulate roads/environment
Simulate traffic conditions
Apply actions from ECU inside simulated environment
The System optionally can connect to external over-the-air or over-the-wire simulation Systems (e.g. RADAR obstacle simulators) to not only validate the ECU but also ECU + Sensor(s) in the same closed-loop environment. The architecture of the System is shown below: